Une équipe de recherche de l'Université Queen Mary de Londres et de l'University College London a récemment publié des résultats de recherche, proposant pour la première fois que les humains pourraient avoir une capacité sensorielle jusqu'alors méconnue - le « toucher à distance », c'est-à-dire qu'ils peuvent détecter l'existence d'un objet cible grâce à de faibles perturbations mécaniques dans le milieu avant de le contacter directement. Cette découverte est considérée comme ayant modifié le cadre cognitif traditionnel du toucher humain, considéré comme « un simple contact étroit et nécessaire », et devrait fournir de nouvelles idées pour la conception de la robotique et de divers dispositifs d'assistance.
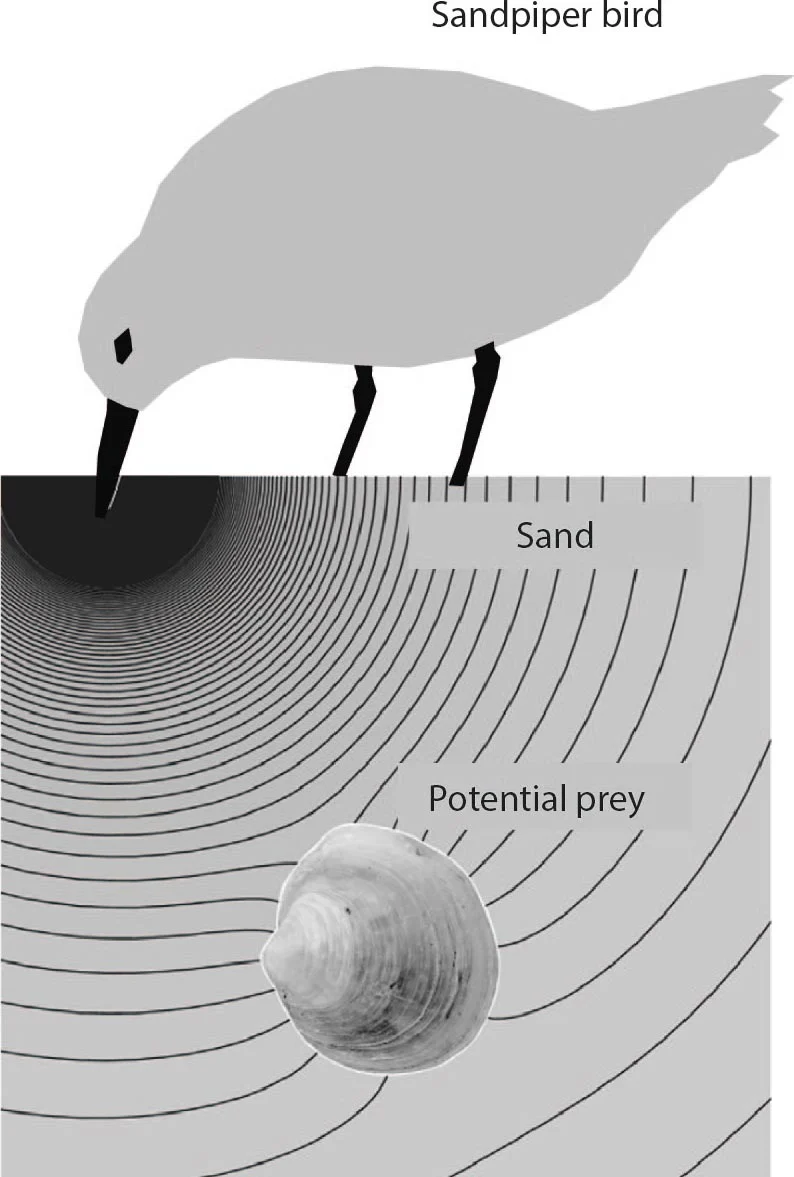
Alors que le toucher humain a longtemps été considéré comme un sens à courte portée reposant largement sur le contact direct peau-objet, les recherches sur la façon dont les animaux perçoivent le monde ont progressivement produit des preuves différentes. Par exemple, certains oiseaux de rivage, comme les bécasseaux et les pluviers, sont capables de localiser des proies enfouies sous le sable en détectant des perturbations mécaniques extrêmement subtiles dans le sable, un processus connu sous le nom de toucher à longue distance. Selon ce mécanisme, lorsque des objets dans l'environnement se déplacent, de petits changements de pression ou des réflexes de mouvement sont produits dans le milieu granulaire, et les animaux captent ces signaux via un système tactile très sensible.

Les dernières recherches posent la question suivante : les humains ont-ils des capacités similaires ? L'équipe de recherche a présenté la conception expérimentale et les résultats pertinents lors de la « Conférence internationale sur le développement et l'apprentissage » (ICDL) de l'IEEE 2025. Dans l'expérience, il a été demandé aux sujets de glisser doucement leurs doigts sur une boîte remplie de sable et, avant de toucher l'objet cible, d'essayer de déterminer s'il y avait un bloc enfoui à un endroit fixe dans la boîte. L'équipe de recherche a contrôlé la position des blocs et utilisé des bandes lumineuses LED pour guider les trajectoires de caresse des sujets, enregistrant ainsi systématiquement leur performance de jugement.
Les résultats expérimentaux ont montré que les participants humains étaient capables de détecter la présence de blocs enfouis avec une précision bien supérieure au hasard, sans les toucher directement. Cela signifie que lorsqu’un doigt humain balaie la surface du sable, il peut en réalité ressentir de très petits changements dans la direction ou la résistance des grains de sable en raison de la présence du solide en dessous. Une analyse plus poussée de la modélisation physique a souligné que la sensibilité de cette capacité de perception est proche de la limite de détection de réflexion mécanique prédite par la théorie, montrant que le système tactile de la main humaine est bien plus raffiné que le « brut » dans la compréhension traditionnelle.
Afin de comparer les performances des humains et des machines en matière de contact à distance, l’équipe a également conçu des expériences parallèles sur des robots. Dans l'expérience robotique, les chercheurs ont utilisé un bras robotique UR5 équipé d'un capteur tactile pour détecter également les blocs enfouis dans le sable, et ont utilisé un algorithme de mémoire à long terme (LSTM) pour apprendre et évaluer les données de détection. Les résultats montrent que dans la plage théorique détectable, la précision du jugement du sujet humain est d'environ 70,7 %. Bien que le robot présente un léger avantage en termes de distance de détection moyenne, la précision globale n'est que de 40 % en raison d'un plus grand nombre de fausses alarmes.
Les chercheurs ont souligné que les performances des deux sont très proches de la limite de sensibilité maximale prédite par le modèle physique, ce qui confirme la « limite physique » du toucher à distance dans les milieux granulaires. Ce qui est plus remarquable, c’est qu’il existe une interaction positive entre les expériences humaines et celles des machines : les expériences humaines inspirent les stratégies d’apprentissage automatique, et les performances des machines aident les chercheurs à interpréter les données sur le comportement humain sous un nouvel angle. L'équipe de recherche estime que cette combinaison de psychologie et de robotique démontre le potentiel de la collaboration interdisciplinaire dans la recherche cognitive fondamentale et l'innovation technologique.
Chen Zhengqi, premier auteur de l'article et doctorant au Laboratoire de robotique avancée de l'Université Queen Mary de Londres, a déclaré que cette découverte ouvre de nouvelles directions pour la conception d'outils et de technologies d'assistance pouvant étendre les capacités tactiles humaines. Par exemple, à l’avenir, des équipements de détection sophistiqués pour les fouilles archéologiques pourront être développés pour localiser des cibles enfouies dans le sable sans détruire les reliques culturelles. Le même principe devrait également être utilisé pour l'exploration de gravier à la surface d'étoiles telles que Mars, ou pour la recherche et le sauvetage dans des environnements sablonneux des fonds marins, rendant plus sûre et plus efficace la réalisation de missions « d'exploration aveugle » dans des environnements à vision limitée, voire dans des conditions dangereuses.
La responsable de l'étude, Elisabetta Versace, maître de conférences en psychologie au Prepared Minds Laboratory de l'Université Queen Mary de Londres, a souligné que c'est la première fois que le toucher à distance est systématiquement étudié sur le corps humain, et il est proposé que les limites de la « gamme du monde perceptuel » de l'homme (le soi-disant champ réceptif) pourraient être bien au-delà de ce qui était auparavant reconnu. Elle estime que ces travaux élargissent non seulement la compréhension théorique des systèmes de perception humains, mais fournissent également de nouvelles idées sur la manière dont les gens interagissent avec des environnements complexes.
Lorenzo Jamone, co-auteur de l'article et professeur agrégé de robotique et d'intelligence artificielle à l'University College de Londres, a souligné que la particularité de cette étude est que les expériences humaines et les expériences robotiques « s'empruntent » mutuellement. Selon lui, ce type de coopération interdisciplinaire aide non seulement les chercheurs à identifier les capacités sensorielles encore à découvrir des êtres humains, mais jette également les bases du développement de robots dotés d'une « intuition » tactile semblable à celle des humains. À l’avenir, avec le développement de la technologie des capteurs et des algorithmes, le toucher à distance devrait devenir l’une des capacités importantes permettant aux robots d’accomplir des tâches dans des scènes extrêmes telles que l’obscurité, la turbidité et l’enfouissement profond.
La recherche est intitulée « Explorer la perception tactile pour la localisation d'objets dans des médias granulaires : une étude humaine et robotique » et a été publiée dans les actes de la conférence internationale 2025 de l'IEEE sur le développement et l'apprentissage. L'étude comprenait deux expériences principales : l'une axée sur l'évaluation de la sensibilité du bout des doigts humains aux signaux tactiles d'objets enfouis dans le sable, et l'autre utilisait un bras robot équipé d'un système haptique combiné à un modèle de mémoire à long terme pour déterminer si la cible existe ou non. L'équipe de recherche a déclaré que les travaux de suivi exploreront davantage les performances du toucher à distance dans d'autres milieux (tels que le sol ou des mélanges de différentes tailles de particules) et évalueront le potentiel de cette capacité pour des applications pratiques dans la vie quotidienne et dans les tâches professionnelles.