Une équipe de recherche de l'Université de Würzburg en Allemagne a récemment développé un nanorobot piloté par des photons, dont le diamètre est environ un cinquantième celui d'un cheveu humain. Il peut suivre, capturer, transporter et libérer avec précision des bactéries dans un environnement microscopique liquide, offrant ainsi une nouvelle voie technologique permettant aux humains de contrôler directement le monde microbien.
Les rapports montrent que ce type de micro-robots est destiné à des opérations à micro-échelle dans lesquelles il est presque impossible d'intervenir efficacement avec des moyens traditionnels. Pour les matériaux biologiques tels que les cellules individuelles et les bactéries dans un environnement liquide, la manière d'obtenir un contrôle de haute précision a toujours été un problème majeur dans la recherche scientifique, et ce nouveau résultat montre que des tâches telles que la collecte et le déplacement des bactéries sont désormais réalisables.
L'équipe de recherche était dirigée par Bert Hecht, professeur à l'Université Julius-Maximilians de Würzburg en Allemagne. La solution principale proposée par l'équipe consiste à utiliser le faible recul généré lorsqu'un seul photon est émis pour piloter le mouvement d'un dispositif à l'échelle micronique appelé « micro-drone ».
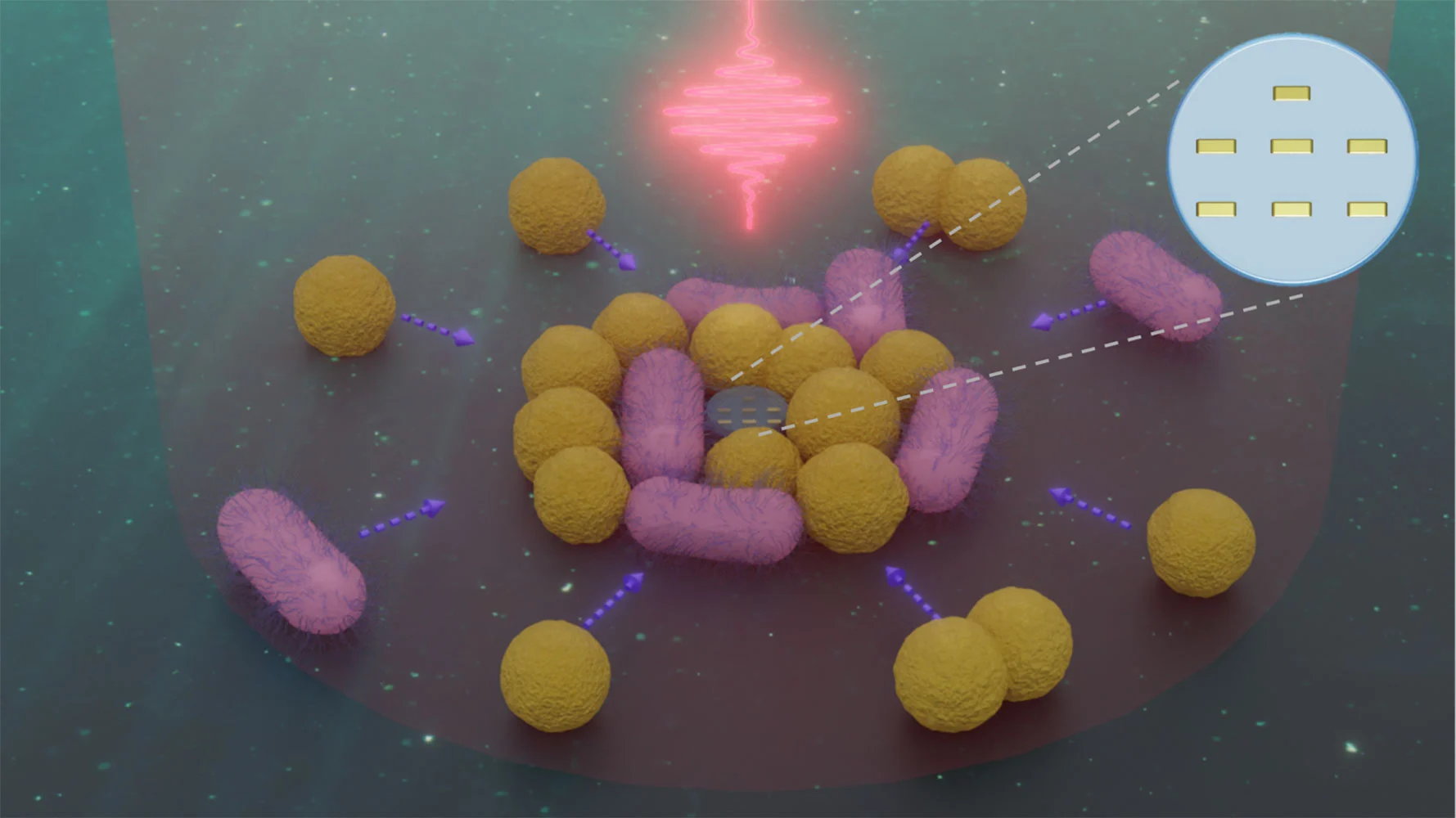
Selon les rapports, jusqu'à quatre nanoantennes plasmoniques peuvent être intégrées à l'intérieur de ces dispositifs. Ils absorbent d’abord la lumière avec des propriétés spécifiques, puis réémettent des photons de manière directionnelle ; chaque tir apportera une force de recul extrêmement faible, qui est en principe similaire à la force de recul d'une balle après sa sortie du canon. Puisque la masse du microrobot lui-même est extrêmement faible, même si cette force est très faible, elle est néanmoins suffisante pour apporter une vitesse et une accélération rapides.
Dans les dernières recherches, les chercheurs ont encore réduit la taille de ce type de robot alimenté par la lumière à moins de 1 micron et simplifié sa méthode de contrôle, tout en conservant le mécanisme de propulsion basé sur le recul des photons.
L’équipe a profité du fait que les fils d’antenne à l’intérieur du robot s’alignent naturellement avec la direction de polarisation de la lumière incidente. En ajustant l'état de polarisation de la lumière, les chercheurs peuvent contrôler la direction du robot, et son élan vers l'avant provient toujours du recul des photons, ce qui rend sa méthode de contrôle plus proche du mode de transport macroscopique « direction plus propulsion ».
Jin Qin, le premier scientifique expérimental sur l'article, a déclaré qu'en substance, ce que l'équipe a construit est un nanorobot piloté par la lumière, qui peut verrouiller et collecter des bactéries. En raison de la structure simplifiée, la taille du robot a été réduite à une échelle où il peut directement entrer dans les activités microbiennes, en un sens, il s'apparente à un « appareil de nettoyage microscopique ».
Les chercheurs ont déclaré que ce type de nanorobot a une grande maniabilité et peut effectuer rapidement des virages à 90 degrés, ce qui lui permet d'effectuer une analyse systématique et efficace sur une vaste zone d'échantillon. En même temps, il peut capturer, transporter et libérer de manière sélective un nombre considérable de bactéries.
Cela signifie que dans un environnement expérimental contrôlé, ce type de dispositif devrait effectuer une opération de « nettoyage » du microenvironnement – en collectant les bactéries de manière concentrée et en les déplaçant vers un emplacement prédéterminé.
Bert Hecht a souligné que cette réalisation démontre clairement que la lumière peut non seulement être utilisée pour observer le monde microscopique, mais peut également être utilisée pour façonner activement le monde microscopique. Même si le concept de « microrobots nettoyeurs » semble futuriste, les principes physiques pertinents ont désormais été vérifiés expérimentalement.
Même lorsqu’ils transportent de plus grandes grappes de bactéries, les nanorobots conservent leur pleine mobilité, même si leur vitesse de déplacement est légèrement réduite. L’équipe de recherche estime que cette stabilité met en évidence son potentiel d’application dans des domaines tels que la microbiologie, la recherche biomédicale et le contrôle précis à très petite échelle.
Le document de recherche pertinent s'intitule « Un nettoyeur robotique à l'échelle nanométrique », co-signé par Jin Qin, Carsten Büchner, Wu Xiaofei et Bert Hecht, et a été publié le 27 mars 2026.