Une équipe de recherche de l'Université de Virginie occidentale aux États-Unis a récemment développé une main robotique douce mais puissante qui peut non seulement cueillir en douceur des fruits et légumes fragiles tels que les fraises, mais également juger de manière exhaustive la maturité par le toucher et la vision pendant le processus de cueillette, ce qui devrait réduire considérablement les coûts de main-d'œuvre et les taux de gaspillage dans le processus de cueillette.
Selon les rapports, l’agriculture est en train de devenir l’une des industries de plus en plus touchées par la technologie robotique. Les agriculteurs de nombreuses régions du monde sont confrontés à la double pression d’une pénurie de main-d’œuvre et d’une hausse des coûts de main-d’œuvre. Dans certaines cultures, les coûts de cueillette manuelle représentent même près de la moitié des coûts totaux de production. Pour les fruits et légumes ayant des fenêtres de cueillette extrêmement courtes et faciles à abîmer, comme les fraises, les framboises et les avocats, il est souvent difficile d'équilibrer efficacité et perte avec la cueillette manuelle traditionnelle ou mécanique rigide. En conséquence, les agriculteurs pourraient perdre jusqu’à un quart de leur rendement.
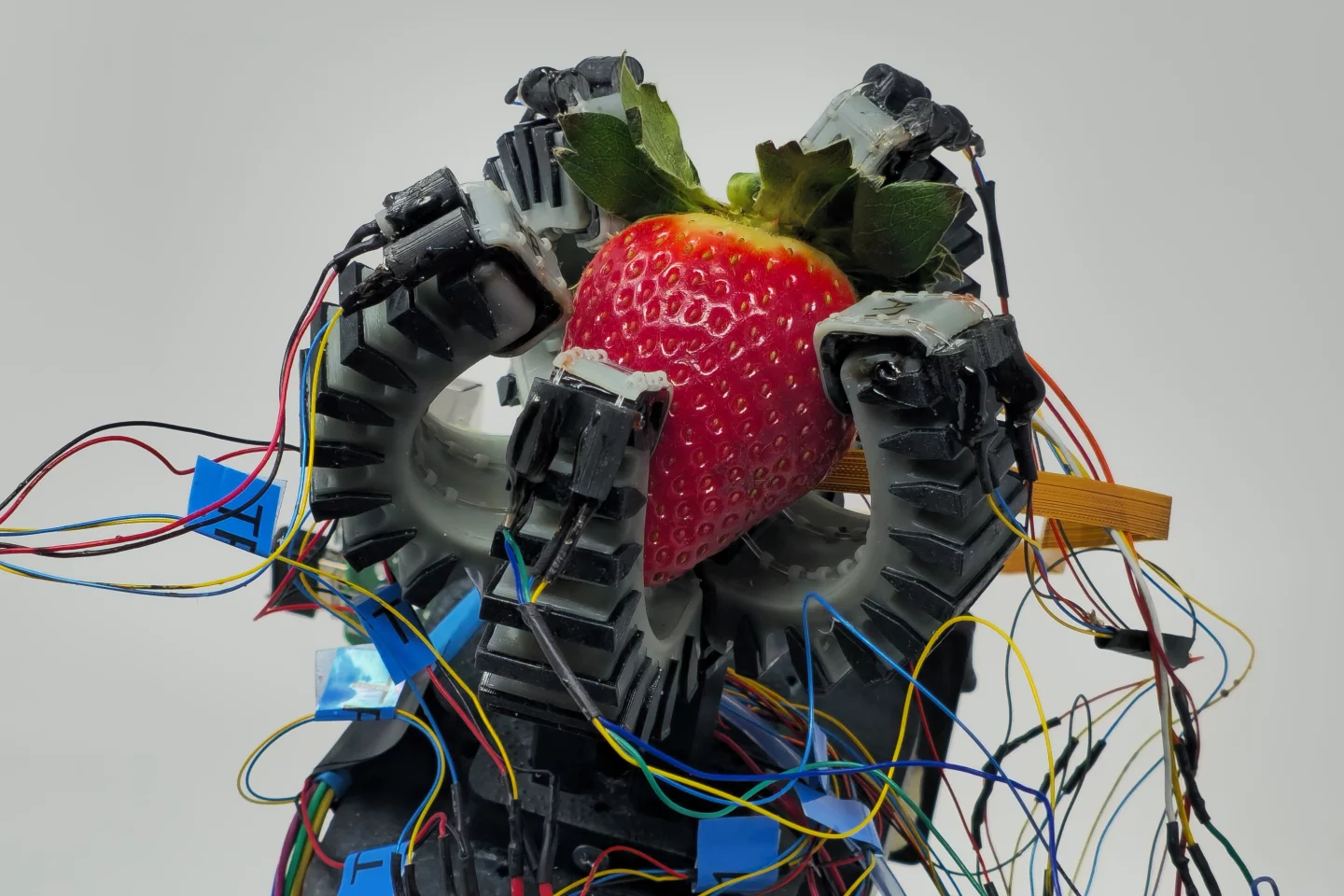
L'équipe « Robiotics Lab » de l'Université de Virginie occidentale travaille au développement de robots imitant le mouvement des animaux. La main de robot souple lancée cette fois n'est pas la « griffe mécanique » métallique à laquelle les gens pensent. Au lieu de cela, il s’inspire de l’anatomie des étoiles de mer et utilise des matériaux en silicone et en polyuréthane pour fabriquer des doigts doux. Dans le même temps, la forme générale conserve une disposition à cinq doigts similaire à celle d'une main humaine, de sorte qu'elle puisse ramasser et tenir les fruits plus naturellement.
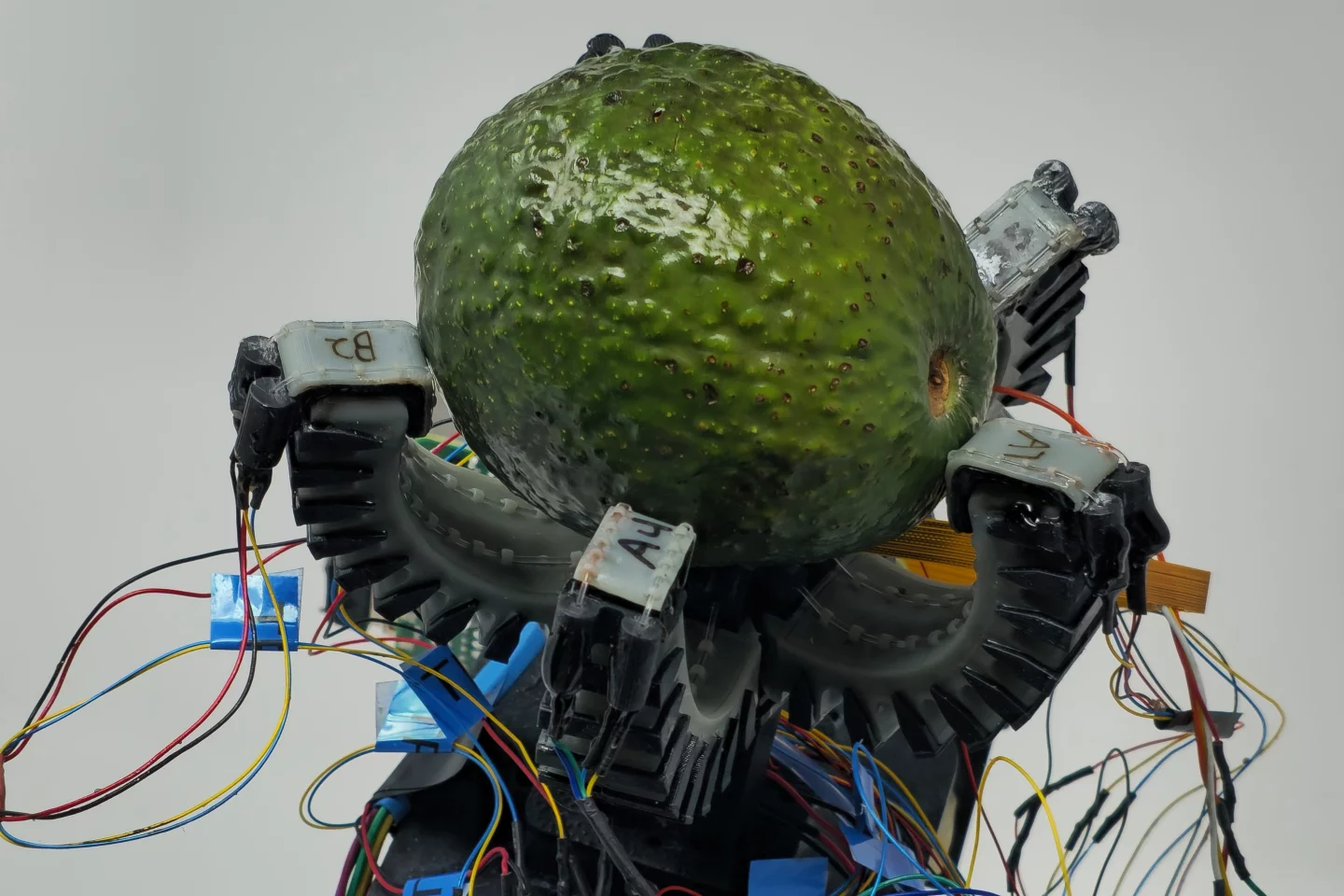
En termes de capacités de perception, cette nouvelle main robotique est équipée d'une caméra miniature permettant de juger visuellement l'apparence des fruits. Cette fonction a été appliquée à certains robots agricoles. Cependant, les chercheurs ont souligné qu’il ne suffit pas de se fier uniquement à l’apparence pour juger avec précision de la maturité. En prenant l’exemple des avocats, leur maturité doit souvent être détectée par un léger pincement. Comment laisser le robot apprendre ce jugement « intuitif humain » est l’une des principales difficultés de cette recherche.
Pour résoudre ce problème, l'équipe de recherche a intégré des capteurs tactiles spéciaux à l'intérieur des doigts souples, de sorte que lorsque le robot presse doucement le fruit, il puisse obtenir des informations physiques sur la dureté et l'élasticité sans écraser le fruit. Ces capteurs peuvent également surveiller la force de maintien en temps réel. Lorsque le système détermine que la prise actuelle n'est pas assez ferme, le robot ajuste automatiquement la force pour empêcher le fruit de glisser ou de tomber au sol.
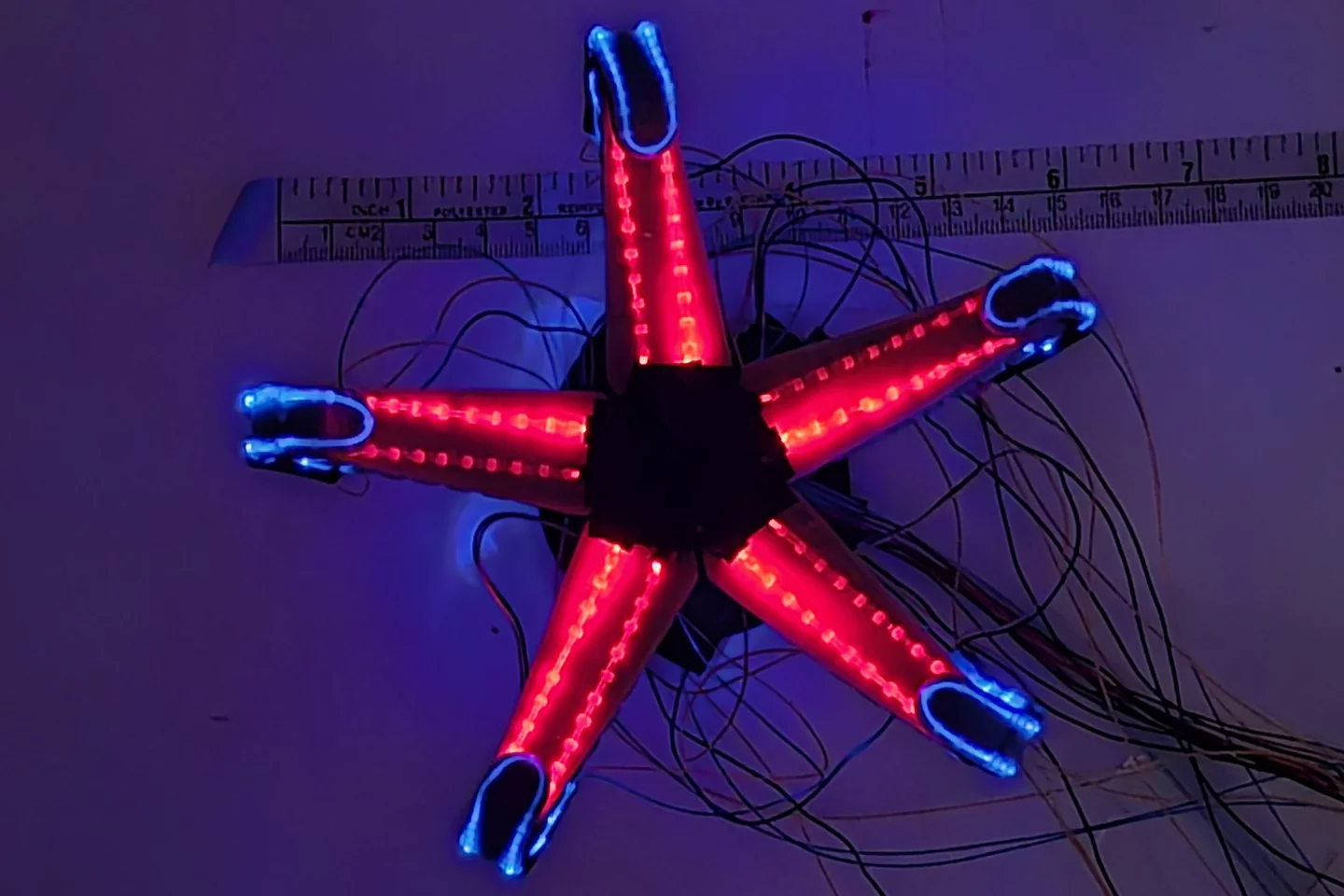
Au cours de la phase de test, la main du robot a démontré une grande précision de perception et de contrôle, et le capteur a pu prédire la forme du fruit saisi avec une précision de près de 100 %. Le prototype actuel pèse moins de 65 grammes, s'ouvre et se ferme en moins de deux secondes et peut soulever un objet maximum d'environ 1 kilogramme, fournissant ainsi les conditions de base en matière de légèreté et de vitesse de réponse pour une véritable intégration de machines agricoles.
Le chef de projet Anand Mishra, professeur adjoint au Département de génie mécanique, des matériaux et aérospatial, a déclaré que l'équipe prévoyait de commercialiser cette technologie de préhension logicielle sur le marché mondial au cours des deux à quatre prochaines années et travaillait au développement d'un dispositif de préhension plus évolutif pour répondre aux besoins d'un déploiement à grande échelle dans ce domaine. Les chercheurs sont également optimistes quant aux perspectives d'application de cette technologie dans un plus large éventail de scénarios, notamment la saisie d'objets étranges lors de missions spatiales, l'exploration de l'environnement sous-marin et le fonctionnement sûr de tissus et d'organes fragiles dans le domaine des soins médicaux.

Des articles de recherche pertinents ont été publiés dans la revue « Nature Communications », montrant que les solutions de préhension de robots combinant des structures logicielles, des systèmes de détection par fibre optique et de vision deviennent une voie technique importante pour les scénarios de haute précision et à pertes élevées. Les chercheurs ont souligné qu'à mesure que ces robots souples progressent progressivement vers la commercialisation, le rapport entre la pression humaine et les déchets de fruits et légumes en première ligne de la cueillette à la ferme devrait être considérablement amélioré, fournissant ainsi une nouvelle base d'outils pour le développement de l'agriculture de précision et des machines agricoles intelligentes.