Même si le micro-véhicule aérien à insectes (MAV) le plus avancé au monde est construit, il ne sera finalement de peu d'utilité s'il ne peut pas atterrir de manière stable. C'est pourquoi les scientifiques de l'Université Harvard ont conçu leur RoboBee avec une paire de longues pattes semblables à celles d'un moustique, dotées d'articulations.
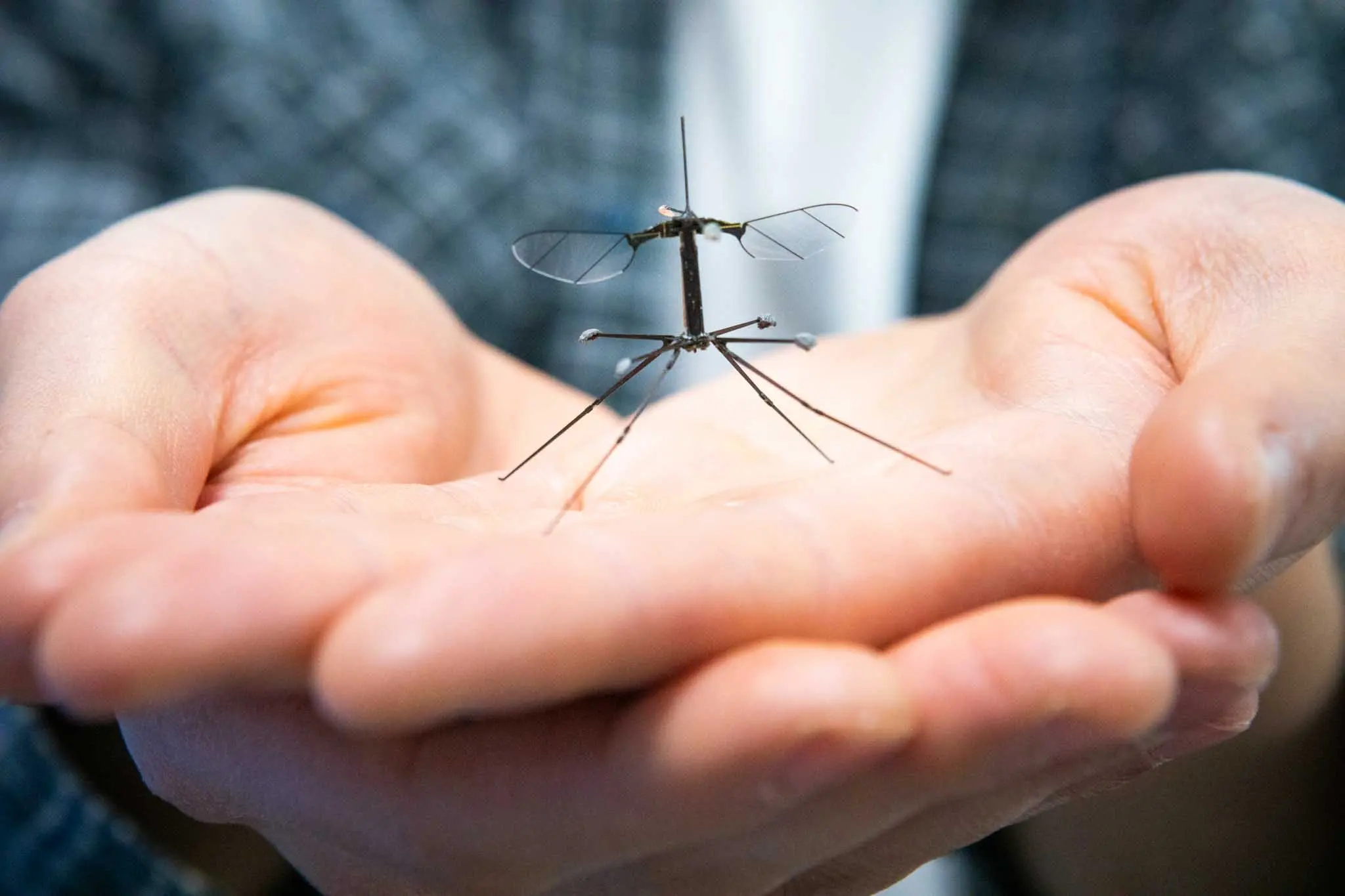
RoboBee a des pattes qui imitent les moustiques. Les futures versions pourraient être utilisées dans des opérations de recherche et de sauvetage ou pour la pollinisation des cultures.
Pour ceux qui ne connaissent pas RoboBee, il s'agit d'un robot inspiré des abeilles qui vole en battant une paire de petites ailes équipées de muscles artificiels. Il a une envergure de moins de 3 centimètres (1,2 pouces) et ne pèse qu'un dixième de gramme... bien qu'il soit connecté à une source d'alimentation et à un microprocesseur via des fils. Cela étant dit, les futures versions pourraient éventuellement fonctionner de manière totalement indépendante. En fait, il existe déjà une version solaire.
Alors que d'autres versions de ce petit robot se sont révélées capables d'effectuer des manœuvres telles que le vol sous-marin et les arrêts suspendus, le modèle de base n'a jamais réussi à atterrir correctement sur des surfaces planes (ou autres). En effet, les tourbillons créés par le battement de ses ailes peuvent provoquer des turbulences de l'air lorsqu'ils sont retenus par le sol, provoquant une perte d'équilibre du robot.
"Auparavant, si nous atterrissions, nous arrêtions le véhicule un peu plus loin du sol, le laissions tomber et priions pour qu'il atterrisse droit et en toute sécurité", a déclaré Christian Chan, un étudiant diplômé en ingénierie qui dirige la refonte mécanique du robot.

Les moustiques sont connus pour leur capacité à se poser en douceur
Les quatre nouvelles pattes de RoboBee, inspirées des pattes de moustiques, sont suffisamment longues et flexibles pour pouvoir entrer en contact avec le sol en toute sécurité avant que le corps du robot ne soit affecté par les turbulences de l'effet de sol.
De plus, de nouveaux algorithmes de contrôle aident le robot à atterrir plus facilement, plutôt que de le laisser « tomber ».

Exposition multiple de RoboBee décollant d'une feuille et atterrissant sur une autre à l'aide de ses nouvelles pattes
"Trouver une inspiration biologique parmi la grande variété d'insectes nous offre d'innombrables façons de continuer à améliorer les robots", a déclaré Alyssa Hernandez, chercheuse postdoctorale et co-auteure du document de recherche. "En retour, nous pouvons utiliser ces plates-formes robotiques comme outils de recherche biologique, en menant des études qui testent des hypothèses biomécaniques."
L'article a été récemment publié dans la revue Science Robotics. Dans la vidéo ci-dessous, vous pouvez voir le RoboBee imiter le mouvement d'atterrissage d'une grue.
Source : École d'ingénierie et de sciences appliquées John A. Paulson de Harvard