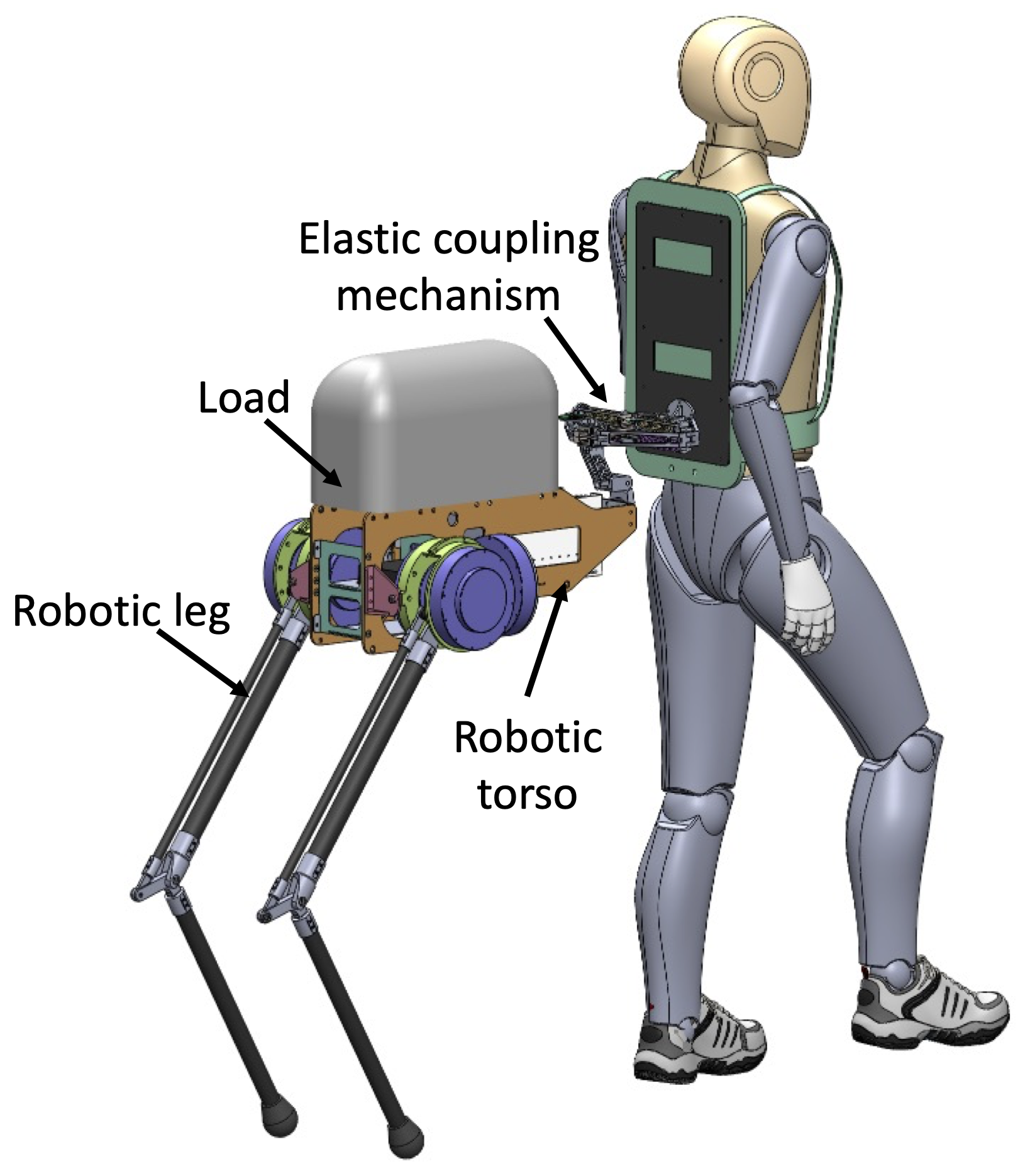
L'équipe du professeur Fu Chenglong de l'Université des sciences et technologies du Sud a initialement développé un robot de marche centaure portable. Les résultats pertinents ont été publiés dans des revues faisant autorité dans le domaine de la robotique. Les robots exosquelettes traditionnels ont une faible efficacité d'assistance et ne peuvent réduire le taux métabolique humain que d'environ 10 %.Le robot centaure brise le design traditionnel et s'inspire de la forme porteuse des quadrupèdes. En tant que membres indépendants, il est connecté au dos humain via une interface de couplage élastique portable pour construire un système quadrupède hybride homme-machine.
Le robot est équipé d'un mécanisme de couplage élastique adouci, qui présente des caractéristiques de rigidité non linéaire et réalise un découplage dynamique de l'assistance électrique et de l'équilibre ; combiné au cadre de contrôle collaboratif walking-interaction,Il peut détecter l'intention de mouvement du corps humain en temps réel, la suivre dans toutes les directions avec une haute précision sans instructions manuelles et produire en même temps une poussée horizontale stable.
La vérification expérimentale montre que le robot a d'excellentes performances. En termes de maniabilité, il peut compléter le cercle en forme de « 8 » autour du pieu dans un espace étroit de 1 mètre et traverser en douceur des surfaces routières complexes telles que des marches et des pentes.
En termes de performances de mise en charge,Lorsque vous portez un poids de 20 kg, le coût métabolique net du corps humain est réduit de 35 % et la pression sur la plante des pieds est réduite de 52 %., il n’y a pas de différence significative entre la stabilité et la marche sans charge.
Ce robot convient au sauvetage d'urgence, à l'exploration sur le terrain, au soutien logistique sur terrain complexe et à d'autres scénarios, et devrait à l'avenir dépasser les limites physiologiques du corps humain.